HolyBro
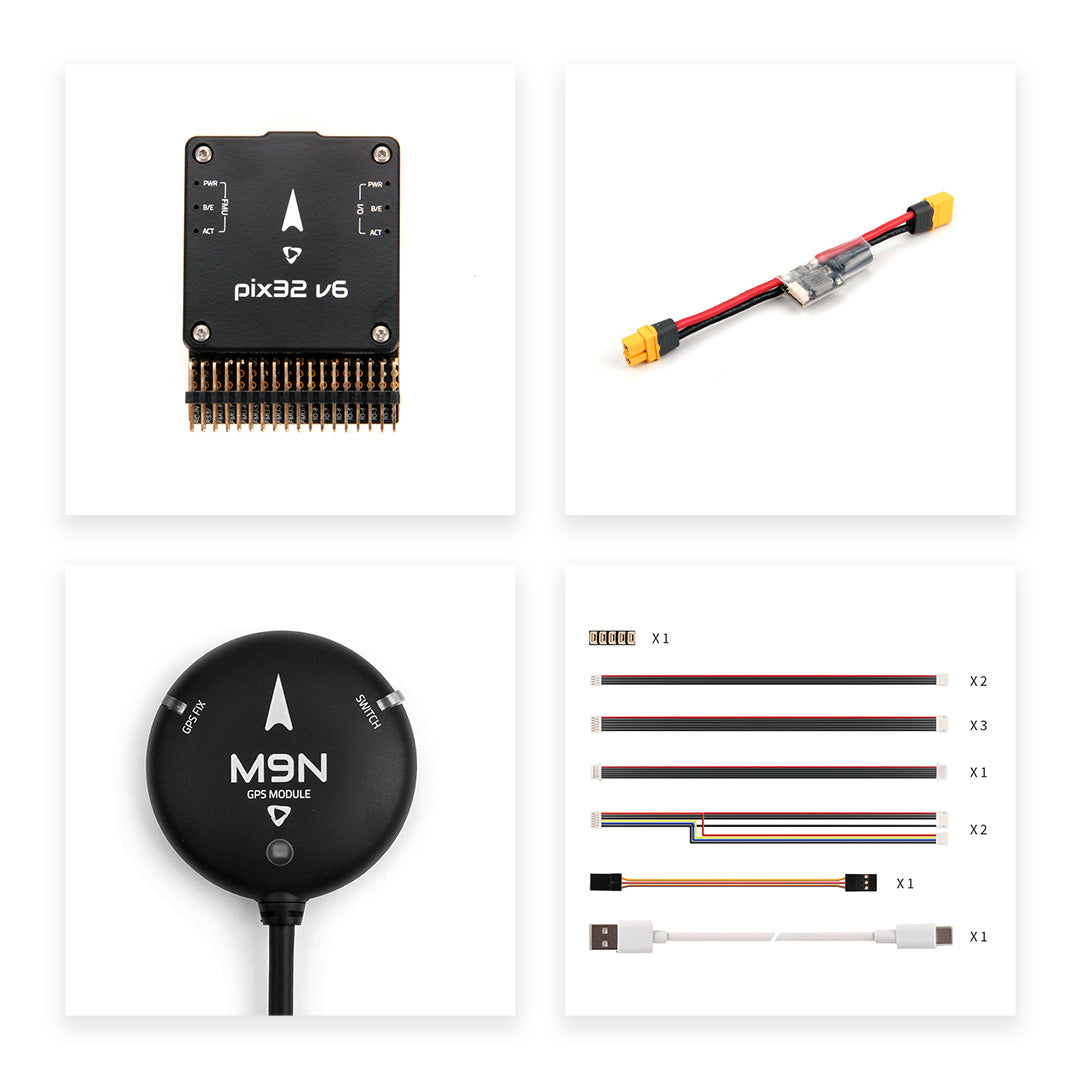
HolyBro Pix32 V6 Flight Controller
HolyBro Pix32 V6 Flight Controller
Couldn't load pickup availability
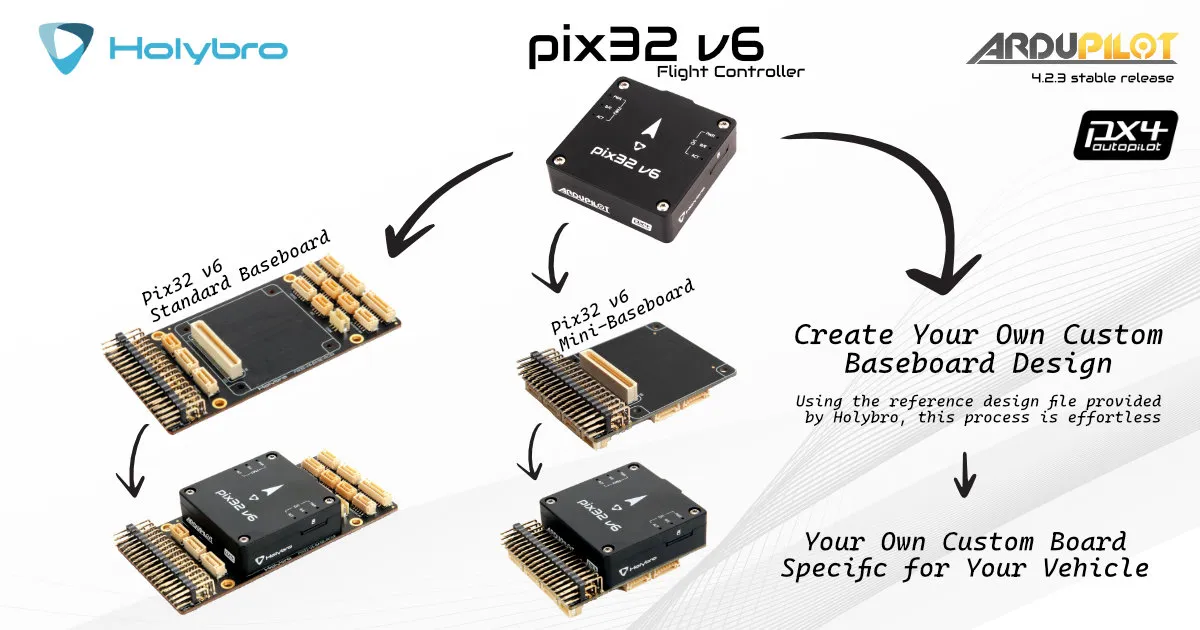
The Pix32 v6 is the latest update to the pix32 v5 flight controllers. It is a variant of the Pixhawk 6C. It is comprised of a separate flight controller and carrier board which are connected by a 100 pin connector. It is designed for those pilots who need a high power, flexible and customizable flight control system.
Inside the Pix32 v6, you can find an STMicroelectronics® based STM32H743, paired with sensor technology from Bosch® & InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle, suitable for both academic and commercial applications.
The Pix32 v6’s H7 microcontroller contain the Arm® Cortex®-M7 core running up to 480 MHz, has 2MB flash memory and 1MB RAM. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models. It includes high-performance, low-noise IMUs on board, designed to be cost effective while having IMU redundancy. A vibration isolation System to filter out high-frequency vibration and reduce noise to ensure accurate readings, allowing vehicles to reach better overall flight performances.
This flight controller is perfect for people that is looking for a affordable and modular flight controller that can use a customized baseboard. We have made the pix32 v6 base board schematics public, you can either make a custom carrier board yourself or just let us help you with it. By using a customize baseboard, you can make sure that the physical size, pinouts and power distribution requirements match your vehicle perfectly, ensuring that you have all the connections you need and none of the expense and bulk of connectors you don’t.
Key Design Points:
- High performance STM32H743 Processor with more computing power & RAM
- New cost-effective design with low-profile form factor
- Newly designed integrated vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings
- IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
Note:
- M10 GPS Requires PX4 1.14, ArduPilot 4.3 or newer is required. (As of Sept 7th 2023, PX4 has released 1.14 RC1 (release candidate).