HobbyGOAT
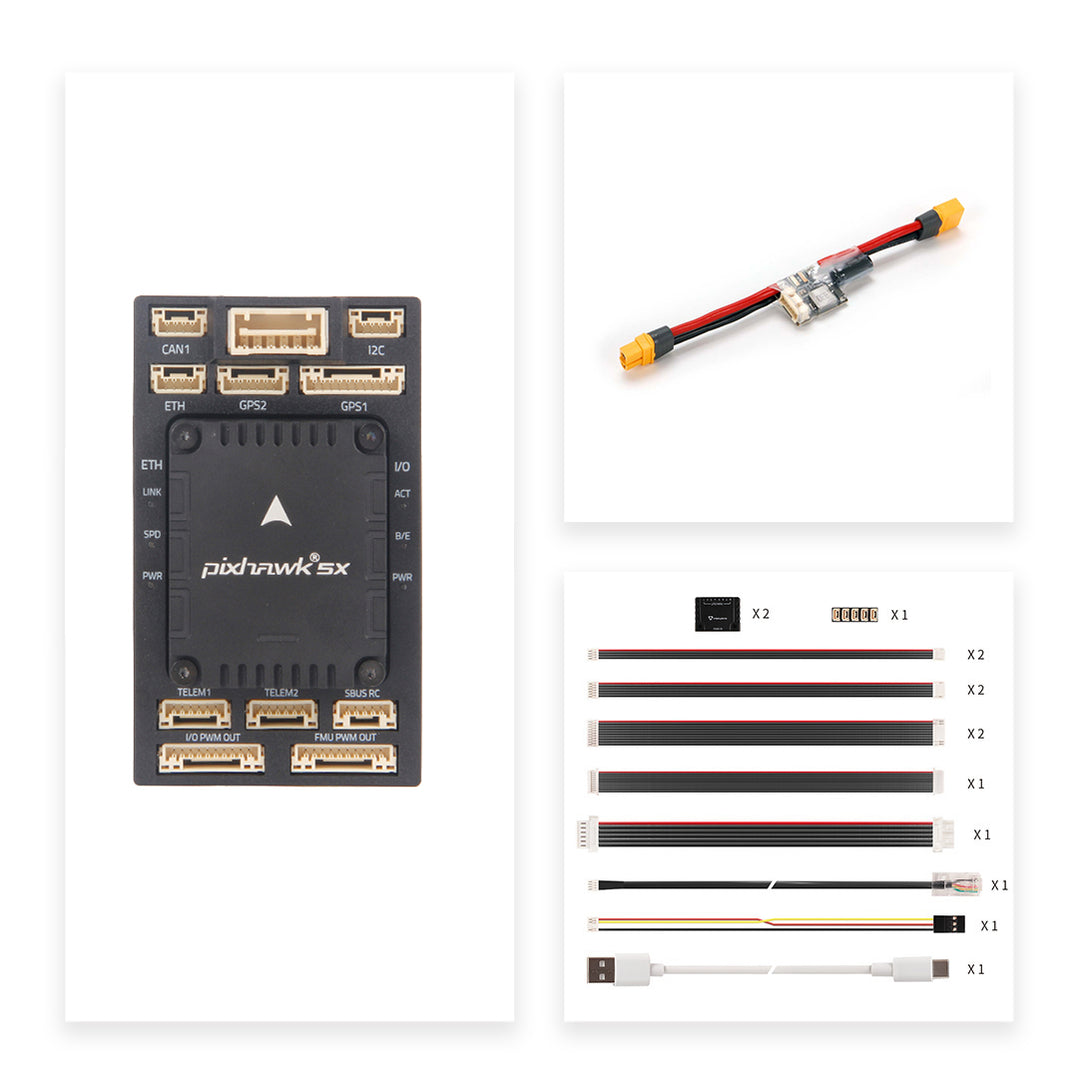
HolyBro Pixhawk 5X Flight Controller
HolyBro Pixhawk 5X Flight Controller
Couldn't load pickup availability
The Pixhawk® 5X is the latest update to the successful family of Pixhawk® flight controllers, based on the Pixhawk® FMUv5X Open Standard and the Pixhawk® Autopilot Bus Standard. It comes with the latest PX4 Autopilot® pre-installed, triple redundancy, temperature-controlled, isolated sensor domain, delivering incredible performance and reliability.
Inside the Pixhawk® 5X, you can find an STMicroelectronics® based STM32F7, paired with sensor technology from Bosch®, InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle, suitable for both academic and commercial applications. The Pixhawk® 5X’s F7 microcontroller has 2MB flash memory and 512KB RAM. The PX4 Autopilot takes advantage of the increased power and RAM. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models.
The FMUv5X open standard includes high-performance, low-noise IMUs on board, designed for better stabilization. Triple redundant IMU & double redundant barometer on separate buses. When the PX4 Autopilot detects a sensor failure, the system seamlessly switches to another to maintain flight control reliability.
An independent LDO powers every sensor set with independent power control. A newly designed vibration isolations to filter out high-frequency vibration and reduce noise to ensure accurate readings, allowing vehicles to reach better overall flight performances. External sensor bus (SPI5) has two chip select lines and data-ready signals for additional sensors and payload with SPI-interface, and with an integrated Microchip Ethernet PHY (LAN8742AI-CZ-TR), high-speed communication with mission computers via ethernet is now supported. Two smart battery monitoring ports (SMBus), support for INA226 SMBus Power module.
The Pixhawk® 5X is perfect for developers at corporate research labs, startups, academics (research, professors, students), and commercial application. The Pixhawk 5X is compatible with both PX4 Autopilot & Ardupilot firmware.
Note:
- The Pixhawk 5X requires I2C protocol for voltage & current data from power module such as PM02D, analog power module (PM02, PM06, PM07) are not compatible to Pixhawk 5X.
- It ships with PX4 firmware by default. User can also use Ardupilot firmware by flashing the firmware via Mission Planner or QGroundControl.
Key Design Points
- Modular flight controller: separated IMU, FMU, and Base system connected by a 100-pin & a 50-pin Pixhawk® Autopilot Bus connector, designed for flexible and customizable systems
- Redundancy: 3x IMU sensors & 2x Barometer sensors on separate buses, allowing parallel and continuous operation even in the event of a hardware failure
- Triple redundancy domains: Completely isolated sensor domains with separate buses and separate power control
- Vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings
- Ethernet interface for high-speed mission computer integration
- Automated sensor calibration eliminating varying signals and temperature
- IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
Technical Specification
-
FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
-
IO Processor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
-
On-board sensors
- Accel/Gyro: ICM-20649 (Hard Mounted)
- Accel/Gyro: ICM-42688P (Soft Mounted)
- Accel/Gyro: ICM-20602 or BMI088 (Soft Mounted)
- Mag: BMM150
- Barometer: 2x BMP388
Electrical data
-
Voltage Ratings:
- Max input voltage: 6V
- USB Power Input: 4.75~5.25V
- Servo Rail Input: 0~36V
Interfaces
- 16- PWM servo outputs
- R/C input for Spektrum / DSM
- Dedicated R/C input for PPM and S.Bus input
- Dedicated analog / PWM RSSI input and S.Bus output
-
4 general purpose serial ports
- 3 with full flow control
- 1 with separate 1A current limit
- 1 with I2C and additional GPIO line for external NFC reader
-
2 GPS ports
- 1 full GPS plus Safety Switch Port
- 1 basic GPS port
- 1 I2C port
-
1 Ethernet port
- Transformerless Applications
- 100Mbps
-
1 SPI bus
- 2 chip select lines
- 2 data-ready lines
- 1 SPI SYNC line
- 1 SPI reset line
-
2 CAN Buses for CAN peripheral
- CAN Bus has individual silent controls or ESC RX-MUX control
- 2 Power input ports with SMBus
-
1 AD & IO port
- 2 additional analog input
- 1 PWM/Capture input
- 2 Dedicated debug and GPIO lines
Mechanical data
-
Dimensions
- Flight Controller Module: 38.8 x 31.8 x 14.6mm
- Mini Baseboard: 43.4 x 72.8 x 14.2 mm
- Standard Baseboard v1: 52.4 x 103.4 x 16.7mm
- Standard Baseboard v2A: 40.2 x 92.3 x 18.4mm
- Standard Baseboard v2B: 40.2 x 98.3 x 16.9mm
-
Weight
- Flight Controller Module: 23g
- Mini Baseboard: 26.8g
- Standard Baseboard v1: 51g
- Standard Baseboard v2A: 58g
- Standard Baseboard v2B: 58g
Share